Eigentlich könnten sog. Gimbal brushless Motoren gut geeignet sein.
Schaut man sich aber mal
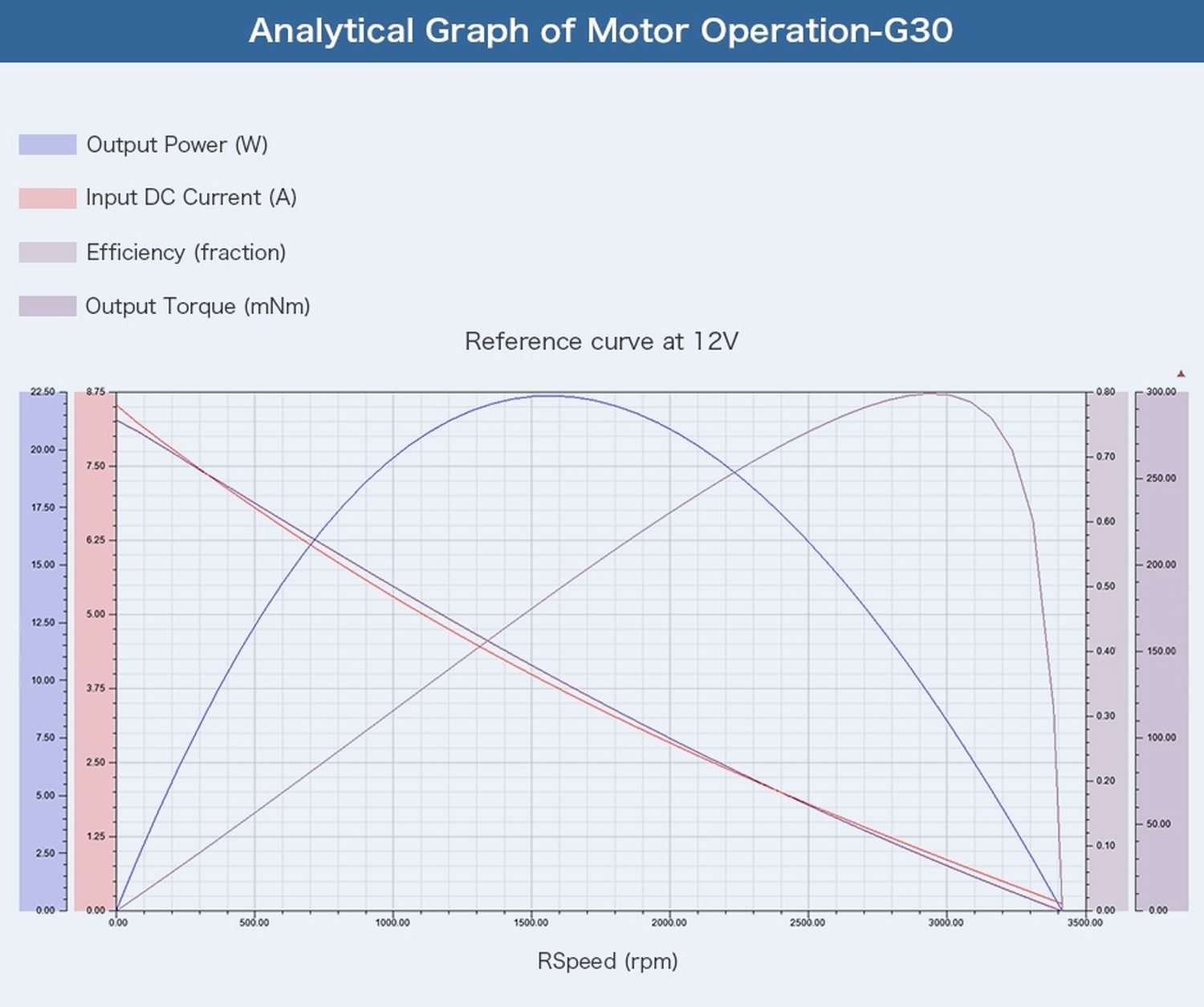 exemplarisch die Daten eines mit 290kV ausgesprochen "hoch drehenden" Gimbalmotor an, würde man dafür einen riesen Löffel mit noch größerer Steigung benötigen. Höher drehende habe ich nicht gefunden.
exemplarisch die Daten eines mit 290kV ausgesprochen "hoch drehenden" Gimbalmotor an, würde man dafür einen riesen Löffel mit noch größerer Steigung benötigen. Höher drehende habe ich nicht gefunden.
Das geht glaube in die falsche Richtung.
Ich wäre da bei Bernd und würde lieber den Rumpf hinten so leicht wie nur irgend möglich bauen, und vorne einen kleinen, hochuntersetzten Innenläufer verwenden. Hab hier noch ein12:1 13:1 Reisenauer Micro Dings Edition liegen. Perfekt für diesen Zweck denke ich.
Aus diesem Thread habe ich noch die
 Daten des Kontronitk Kondor 15-69 ausgegraben:
Daten des Kontronitk Kondor 15-69 ausgegraben:
das wäre doch ein Spitzenmotor, direkttreibend, mit 91% max eta
und mit 150g rund 100g schwerer als der Rotax z.B.
Schaut man sich aber mal
Das geht glaube in die falsche Richtung.
Ich wäre da bei Bernd und würde lieber den Rumpf hinten so leicht wie nur irgend möglich bauen, und vorne einen kleinen, hochuntersetzten Innenläufer verwenden. Hab hier noch ein
Aus diesem Thread habe ich noch die
das wäre doch ein Spitzenmotor, direkttreibend, mit 91% max eta
und mit 150g rund 100g schwerer als der Rotax z.B.
Zuletzt bearbeitet: