Hallo,
bisher war ich hier nur stiller Mitleser und habe so viel von euch gelernt - ganz großen Dank an alle, die hier ihre Ideen und Erfahrungen posten. Daher nun auch ein kurzer Baubericht von mir, zumal man über den Barracuda ja wirklich nicht viel findet.
Meinen (GPS Version in C64) hab ich Mitte April bei Stefan Eder spontan geholt, nachdem meine Supra nach über 8 Jahren treuen Diensten beim Abstieg ihr Höhenleitwerk verlor. Glücklicherweise hatte er gerade einen verfügbar. Leer wiegt der Barracuda 1667g:
- Rumpf: 367g
- Haube: 15g
- Mittelflügel: 628g
- Außenflügel links: 268g
- Außenflügel rechts: 268g
- Höhenruder: 33+32+6=71g
- Verbinder: 50g
Bei den Komponenten habe ich mich an Stefan Eders Empfehlungen gehalten:
- Höhe: KST DS315
- Seite: KST X08
- QR+WK: ST X10 mini
Für den Einbau im Rumpf wurde das passende Servobrettchen und die IDS Rahmen von Servorahmen.de gleich mitgenommen.
Als Regler kommt ein YGE 65 LVT zum Einsatz.
Für die Auswahl der Motor/Luftschrauben/Akku Kombi gab es von Stefan Eder die Empfehlung, das Modell erst einmal mit passenden Bleistücken auszuwiegen. Und siehe da: Die Antriebsempfehlung auf der AEROTEC Homepage wäre deutlich zu leicht gewesen. Statt 130g muss der Getriebemotor eher 170g und der Akku 140g schwer sein.
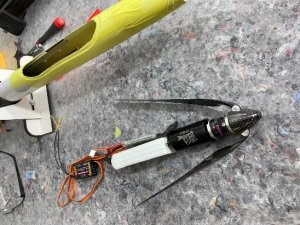
Letztlich kamen rein (in der Reihenfolge):
- Luftschraube GM 15x8 mit GM Spinner 30mm
- Motor Tenshock EDF 1530-8T-3480KV mit Micro Edition 5:1N
- YGE Steller an die linke Rumpfwand, daneben den SLS QUANTUM LiPo 3S/1600mAh 40C/80C
- Darunter ein gestrippter Angstakku 2s350mAh (TopFuel ECO-RX, 2S/350mAh)
- HR/SR Servo
- Vorhandener SM GPS Logger
- Empfänger Jeti REX10
Die Antennen liegen im Rumpf direkt hinter dem Empfänger und damit weit genug weg von Akku, GPS und dem CFK von Fläche und Rumpf. Beim Empfangstest und den ersten Flügen gab es keine Auffälligkeiten. Mal sehen, ob das auch so bleibt, wenn ich das erste Mal Ballast dazu lade. Die Ballastkammer liegt direkt unter dem Flügel und damit etwa 6-7cm von den Antennen weg. Sie wird mit Stahl-Rundstücken befüllt.
Den Empfänger-Reserveakku habe ich vom Schrumpfschlauch befreit und die beiden Zellen in eine Ebene gelegt. Damit passt er genau unter den Antriebsakku. Das BEC des YGE wird auch 7,8V eingestellt und der Akku entsprechend vorgeladen. Die Telemetrie überwacht sowohl die BEC- als auch die Empfängerakkuspannung.
Nach einigem Hin- und Herprobieren, liegenlassen und bei ein paar Gläsern Wein drüber nachdenken passt dann doch alles rein.
Der GPS Logger sitzt auf einem kleinen Brettchen, dass am Servobrett mit verschraubt wird. Darunter liegt der Empfänger. Zwischen eingeschobenem Akku und Servobrett sind noch ca. 15mm Platz. Damit geht der Akku gerade so ein und raus.
Alle Kabel sind auf die max. notwendige Länge gekürzt. Die Akku-Steckverbindung besteht aus 3,5mm Steckern und Buchsen. Das braucht deutlich weniger Platz als die 4mm Variante.
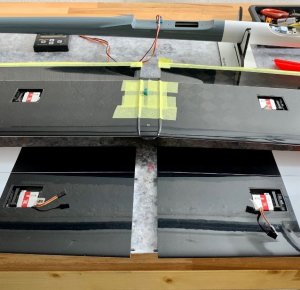
Der Einbau der IDS Rahmen in die Flächen ging schneller als erwartet – v.a. weil das meine erste IDS Anlenkung war. Hierfür bekam ich von AEROTEC neben den Einstellanweisungen auch eine Einbauanleitung. Der schwierigste Teil ist eh ab Werk erledigt – die IDS Ruderhörner sind in die Querruder und Klappen schon eingeharzt.
Also auch hier wieder schön nach Anleitung die Rahmen vorbereiten, Servohörner aufdrücken (vorher angewärmt) und gefühlte zehn Mal ein- und wieder ausbauen. Achtung: Die Einbauanleitung ist für den Orca geschrieben. Daher passen die angegebenen Gestängelängen zumindest bei mir nicht. Aufpassen muss man beim Einschieben der Passbolzen in die Ruderscharniere. Schnell drückt man da auch durch die Dichtlippe. Die teilweise beschriebenen Probleme mit schlechter Passung der Servohörner hatte ich glücklicherweise nicht.
Zum Demontieren der Passbolzen hilft ein längerer 1,2mm Stahldraht. Damit ließ sich der Stift auch wieder herausschieben.
Für die Servoverbindungen habe ich die beiliegenden MPX Stecker verwendet. Auch hier habe ich mich schlussendlich fürs Einkleben entschieden. Die Außenflügel werden eh mit Tesa gesichert. Bei meiner Supra hat diese Methode immer funktioniert – selbst bei ruppigem Wetter und härteren Landungen hat sich das nie gelöst.
Fürs Einstellen der Ruder hab ich mir in der Bucht 4 digitale Heli-Pitchlehren besorgt. Bei denen waren zwar die Batterien leer, dafür kostete das Stück auch nur 3 EUR. Versehen mit Brettchen und Klammer ließen sie sich an den Klappen befestigen. Die Ruderwege mussten zwar in Winkel umgerechnet werden. Dafür ging die Einstellung um ein Vielfaches schneller als mit Lineal und Winkel.
Nach der Einstellerei und Programmierung von Flugphasen, Butterfly, Schaltern und Telemetrie ging es nochmal auf die Waage. Die blieb bei genau 2300g stehen. Damit ergibt sich eine Flächenbelastung von 29,1g/qdm. Der Schwerpunkt liegt jetzt ohne Blei bei 115mm und damit in der Mitte der angegebenen Range (112-118mm).
Leider machte mir das Wetter erstmal einen Strich durch die Junfernflug Rechnung. Erst 10 Tage nach Fertigstellung war letzten Sonntag das Wetter so, dass ich mich mit dem Barracuda auf meine Hauswiese getraut hab.
Und er fliegt. Beim Kreisen braucht es Seitenrudereinsatz, dafür geht es mit gesetzten Klappen praktisch „auf dem Teller“. Die Querruderausschläge werde ich noch etwas reduzieren. Stellt man die Wölbklappen nach ob, setzt er sich auch gegen böigen Wind problemlos durch.
Mit einer Akkuladung kommt man 3-4 Mal auf 200m Höhe. Der Akkustrom beträgt anfangs ca. 40A und geht um Flug dann etwas zurück. Selbst ohne Thermik sind damit schon ausgedehnte Flüge möglich.
Alles in Allem ein würdiger Ersatz für meine Supra (die ich sicher irgendwann wieder aufbauen werde) und genau das Richtige für meine Flachlandfliegerei…
 was ich erkennen kann, ist die Grundform des satorirumpfes, vergrößerte sl und hl.
was ich erkennen kann, ist die Grundform des satorirumpfes, vergrößerte sl und hl.
 hannah
hannah











 Bei mir sind es +10 / -9,4 Grad und damit +17 bzw. -15mm. Der Servoarm vom DS315 ist 10mm - mehr geht bei mir auch nicht rein. Die Ausschläge reichen locker, auch für einen engen Looping. Zum Kurbeln braucht es eh nur kleinste Ausschläge…
Bei mir sind es +10 / -9,4 Grad und damit +17 bzw. -15mm. Der Servoarm vom DS315 ist 10mm - mehr geht bei mir auch nicht rein. Die Ausschläge reichen locker, auch für einen engen Looping. Zum Kurbeln braucht es eh nur kleinste Ausschläge…





