Hallo Onki,
zumindest sehe ich das mal als interessanten Denkanstoß, wie sowas zu lösen wäre, d.h. zu verhindern das das FW versehntlich am Boden einfährt. Aber wenn schon denn schon, auch im umgekehrtem Fall sollte es es ein versehentliches ausfahren am Boden verhindern. Beides ist mir auch schon passiert. Die Ausfahrposition des Schalters habe ich nun im der Vorflugabfrage mit drin. Versehentlich eingefahren vor dem Start ist mir aufgefallen, als ich auf die aktuelle Strommessung schaute.
Prinzipiell würde ich es wohl über einen sensiblen Höhensensor und log. Schalter am Einfachsten finden. Die Frage wäre wohl wie genau der wäre, um nicht das Modell zum Ausfahren des FW über einen Meter hoch halten zu müssen. Aber auch hier könnte man diesen log. Schalter überlisten, indem in Bodennähe eben noch ein Taster zusätzlich gedrückt werden muss. Damit wäre in Bodennähe ohne etwas Mühe kein Aus und Einfahren möglich. Würde natürlich nicht gehen wenn Du in der Talstation alles aktivierst und dann das Modell noch hunderte Meter hoch trägst.
Wäre nur die Gefahr, ab einer bestimmten Höhe zum ausfahren zwei Geber betätigen zu müssen. Das ist doof. Falls es aber die Auflösung/Genauigkeit des Höhensensors hergibt, lösbar. Zusätzlich gibt es ja noch programmierbare Ansagen.
Der Gedanke von Eddy ist mir auch gekommen, den halte ich für sehr Zielführend. Die Frage wäre nur, Laser, Infrarot oder Ultraschall.
Ich denke mal, Laser. Eine Austrittsöffnung unter dem Rumpf sollte nicht das Problem sein. Das verdrecken sehe ich nun nicht als Hinderniss.
Da Du ja auch Jeti benutzt, würde ich dafür einen Servoeingang als DI nutzen und den über einen log. Schalter verknüpfen.
Oder eben, das FW weißt einen entsprechenden Federweg auf um als einfachste Lösung den Mikroschalter zu nutzen, oder so einen Drucksensor:
Dieser Drucksensor funktioniert mittels der analogen Erkennung von Widerstand, wenn Druck von außen auf den Sensor einwirkt verändert sich der Widerstand und somit die Spannung des analogen Signals. Der Sensor ist hochsensibel, flexibel und der

www.pollin.de
Aber diese Einseitigkeit wäre für mich halbgegart.
Dann über so etwas:
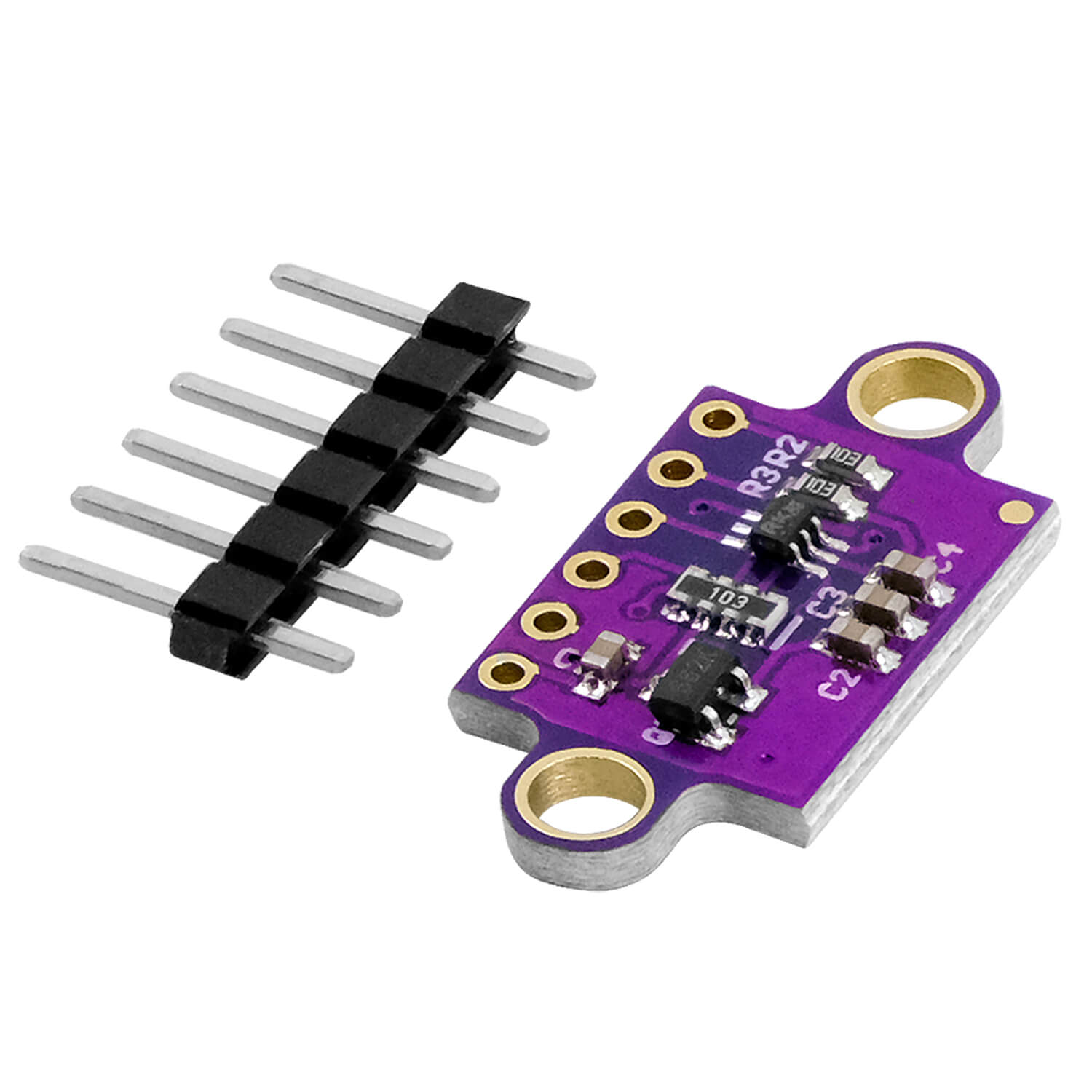
Unser TOF Sensor kann im Normalmodus Entfernungen von bis zu 1 m mit einer Auflösung von 1mm melden. Im Langstreckenmodus kann der Sensor Entfernungen von bis zu 2 m melden, aber mit sehr viel geringerer Genauigkeit. Die Reichweitenmessungen sind über die I2C (TWI)-Schnittstelle der Sensoren...

www.az-delivery.de
Auch das wäre der Versuch wert, insbesondere auf Gras.
Entdecken Sie IR Infrarot Hindernis Sensor Erkennung Abstandssensor Modul Arduino Raspberry Pi in der großen Auswahl bei eBay. Kostenlose Lieferung für viele Artikel!
www.ebay.de
Tschüß
Knut







")