Hallo,
Ich bin all die Jahre mit einem dritten Steuerknüppel im Genickt geflogen und das war eigentlich ok, aber man geht ja mit der Zeit.
Auf den Bau geh ich nicht weiter groß ein, da gibt es schon genügend Information im Net zb.
https://figch.de/index.php?nav=fpv_ht
https://www.rcgroups.com/forums/sho...-Headtracker-(Easy-build-No-drift-OpenSource)
Und die SW hab ich von hier :
https://github.com/kniuk/DIY-Head-Tracker
Da ich noch 2 IMU 9250 aus alten Tagen hatte wo ich selbst meine Flightcontroller zusammen geschustert hatte kamen diese jetzt auch bei dem Tracker zum Einsatz, man muss bei der SW nur unter Config.h die Einstellungen vornehmen.
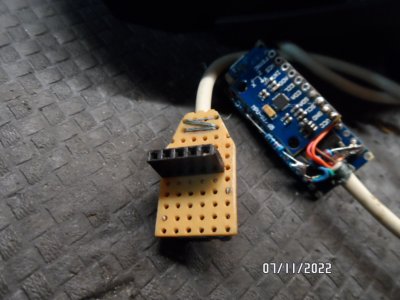
Die Platinen hab ich übereinander gestapelt und nur Pin A4 & A5 wie SDA & SCL mit Stiftleiste verlötet, die restlichen Anschlüsse wie ein Spannungsteiler ( 10k / 20k damit ich auf 3.3 V Ausgang komme) wird alles lose Platziert, die Platinen werden durch Spacer von Stiftleisen auf abstand gehalten.
Das Gehäuse hab ich für den Originalhalter von der Quanum Cyclops entworfen, der USB Anschluss vom Adruino bleibt zugängig und die Reset Taste ist von der Unterseite wie auch die LEDs zugängig.
Den Zentriertaster zum Nullen der Gyros hab ich direkt auf der Steckerplatine verbaut und komm da bei bedarf einfach mit dem Daumen dran, der Stecker selbst ist aber nur für die T16 mit modifizieren UART Port angedacht.
Ich habe dazu Aux 1 um einen Pin erweitert ( PPM Eingang von DSC abgegriffen ) wie die Zugangsöffnung ein Stück erweitert, mit einem Lochrasterstreifen wird der zusätzliche Pin Stabilisiert.
Die Gehäuse verklebe ich einfach mit paar Tropfen Sekundenkleber, ich denke nicht das ich da jemals noch mal ran muss.
Mehr als wichtig ist das gefühlvolle Kalibrieren sonst kann einiges schief laufen, ich hatte das Paar mal das eine ander Achse mitging obwohl ich nur eine geschwenkt hatte.
Und nun lass ich Bilder sprechen... anbei auch die 3 gcode Dateien zum Download als TXT.. müsst ihr halt wieder umbenennen in gcode
Gruß
Werner
Ich bin all die Jahre mit einem dritten Steuerknüppel im Genickt geflogen und das war eigentlich ok, aber man geht ja mit der Zeit.
Auf den Bau geh ich nicht weiter groß ein, da gibt es schon genügend Information im Net zb.
https://figch.de/index.php?nav=fpv_ht
https://www.rcgroups.com/forums/sho...-Headtracker-(Easy-build-No-drift-OpenSource)
Und die SW hab ich von hier :
https://github.com/kniuk/DIY-Head-Tracker
Da ich noch 2 IMU 9250 aus alten Tagen hatte wo ich selbst meine Flightcontroller zusammen geschustert hatte kamen diese jetzt auch bei dem Tracker zum Einsatz, man muss bei der SW nur unter Config.h die Einstellungen vornehmen.
Die Platinen hab ich übereinander gestapelt und nur Pin A4 & A5 wie SDA & SCL mit Stiftleiste verlötet, die restlichen Anschlüsse wie ein Spannungsteiler ( 10k / 20k damit ich auf 3.3 V Ausgang komme) wird alles lose Platziert, die Platinen werden durch Spacer von Stiftleisen auf abstand gehalten.
Das Gehäuse hab ich für den Originalhalter von der Quanum Cyclops entworfen, der USB Anschluss vom Adruino bleibt zugängig und die Reset Taste ist von der Unterseite wie auch die LEDs zugängig.
Den Zentriertaster zum Nullen der Gyros hab ich direkt auf der Steckerplatine verbaut und komm da bei bedarf einfach mit dem Daumen dran, der Stecker selbst ist aber nur für die T16 mit modifizieren UART Port angedacht.
Ich habe dazu Aux 1 um einen Pin erweitert ( PPM Eingang von DSC abgegriffen ) wie die Zugangsöffnung ein Stück erweitert, mit einem Lochrasterstreifen wird der zusätzliche Pin Stabilisiert.
Die Gehäuse verklebe ich einfach mit paar Tropfen Sekundenkleber, ich denke nicht das ich da jemals noch mal ran muss.
Mehr als wichtig ist das gefühlvolle Kalibrieren sonst kann einiges schief laufen, ich hatte das Paar mal das eine ander Achse mitging obwohl ich nur eine geschwenkt hatte.
Und nun lass ich Bilder sprechen... anbei auch die 3 gcode Dateien zum Download als TXT.. müsst ihr halt wieder umbenennen in gcode
Gruß
Werner
Anhänge
-
 SAM_5070.JPG290,4 KB · Aufrufe: 54
SAM_5070.JPG290,4 KB · Aufrufe: 54 -
 SAM_5082.JPG290,8 KB · Aufrufe: 56
SAM_5082.JPG290,8 KB · Aufrufe: 56 -
 SAM_5081.JPG288,3 KB · Aufrufe: 58
SAM_5081.JPG288,3 KB · Aufrufe: 58 -
 SAM_5080.JPG296,7 KB · Aufrufe: 57
SAM_5080.JPG296,7 KB · Aufrufe: 57 -
 SAM_5079.JPG290,1 KB · Aufrufe: 64
SAM_5079.JPG290,1 KB · Aufrufe: 64 -
 SAM_5078.JPG295 KB · Aufrufe: 55
SAM_5078.JPG295 KB · Aufrufe: 55 -
 SAM_5077.JPG295,6 KB · Aufrufe: 51
SAM_5077.JPG295,6 KB · Aufrufe: 51 -
 SAM_5076.JPG297 KB · Aufrufe: 52
SAM_5076.JPG297 KB · Aufrufe: 52 -
 SAM_5071.JPG291,3 KB · Aufrufe: 59
SAM_5071.JPG291,3 KB · Aufrufe: 59 -
 SAM_5072.JPG298,4 KB · Aufrufe: 48
SAM_5072.JPG298,4 KB · Aufrufe: 48 -
 SAM_5073.JPG300 KB · Aufrufe: 53
SAM_5073.JPG300 KB · Aufrufe: 53 -
 SAM_5074.JPG290,9 KB · Aufrufe: 57
SAM_5074.JPG290,9 KB · Aufrufe: 57 -
 SAM_5075.JPG294,2 KB · Aufrufe: 56
SAM_5075.JPG294,2 KB · Aufrufe: 56 -
 SAM_5085.JPG298,1 KB · Aufrufe: 56
SAM_5085.JPG298,1 KB · Aufrufe: 56 -
AA8_Tracker Boden.txt246,1 KB · Aufrufe: 65
-
AA8_Tracker Gehäuse Boden.TXT696,9 KB · Aufrufe: 52
-
AA8_Tracker Gehäuse.TXT1,2 MB · Aufrufe: 58
Zuletzt bearbeitet: