Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Sukhoi SU-34 Fullback - von der Schaumwaffel zum "richtigen" Flieger - mit 2x Kolibri
- Ersteller Okke Dillen
- Erstellt am
Superkleber
User
Bleibt immer noch die Möglichkeit, die Dinger gegensinnig zum HR dazuzumischen und ein bißchen QR noch mit rein dann siehts aus wie im Video, wäre halt nur weniger edel.
Meier111
User
Mahlzeit Kollegen und danke für Eure Beiträge!!
Danke Florian, endlich mal eine Erkenntnis aus der Praxis! --> q.e.d.
...
Ok, wer hat Lust den Ardu zu proggen? Die Idee zur Vorgehensweise habe ich ja komplett geliefert
Grüße o.d.")
Angenommen, ich könnte sowas bauen, würde mir die Motivation fehlen.
Ein reizvolles Projekt, aber, ab welcher Modellgröße merkt man denn eine Wirkung?Ganz ehrlich...... Egal ob an, aus, hoch, runter, viel oder wenig Ausschlag. Einfluss hat es auf das Modell in KEINSTER Weise genommen.
Sieht eigentlich nur geil aus wie die sich bewegen.
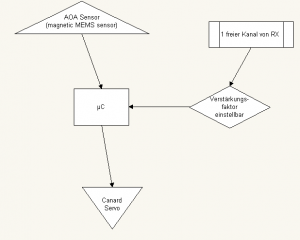
Ich würde es so bauen:
Anhänge
Okke Dillen
User
Nabendsns,

2er hab ich noch da, sind aber m.E. schon zu groß.
Hab noch zahllose Bilder durchgeguckt und schätze 5x7 ist das höchste der Gefühle. Größer wäre zwar einfacher, sähe aber sch..ße aus. Eine Verschönerung sind die beiden Dinger ohnehin nicht... :rolleyes:")

Eine Wirkung? Ab Modellgröße "flugfähig" würde ich mal sagen. Je größer, umso eher auch für unsere menschlische Wahrnehmung erfaßbar.
Der Knackpunkt liegt eher in der Machbarkeit in beliebig kleinem Maßstab. 1:16 oder meinetwegen :15 ist schon sportlich! Zugegeben
Ab 1:8...9 wird es fürs Auge deutlich wahrnehmbar, also die Mehrzahl aller Jetmodelle. In der Größe sind die baulichen Herausforderungen auch eher überschaubar.
Bei 1:15 oder 16 grenzt das an "Uhrmacherei"
So wie in Deiner Skizze habe ich mir das vorgestellt, nur jetzt noch sinngemäß um einen Eingang fürs Höhenrudersignal erweitert, zum Durchleiten des HR-Signals ohne Zuwirkung des Sensors (zum Beimischen für Flieger mit HR-wirksamen Canards).
Nochn Tasteneingang dazu zum Kalibrieren der Neutrallage, nur im KAL-Modus aktiv
Eine weitere Taste für ein konstantes Mittensignal zum Servo(s) (1520µs wenn gedrückt, ist immer aktiv. Dient zur mechanischen Neutralstellung der Canards zur Servomitte)
Ein oder zwei unterschiedlich farbige LEDs zur Mitteilung des Betriebszustandes
Merke: Im Kalibriermodus folgen die Servos den Sensoren erst, nachdem deren Neutrallage definiert wurde. BIS dahin sind die Servos auf 1520µs konstant.
Kalibrierung:
- Beide Tasten für 3 Sek gedrückt = Kalibriermodus --> LED blinkt schnell, gelb (rot+grün)
- Nochmal dasselbe verläßt den Kal Modus wieder ohne Änderung --> LED leuchtet grün dauerhaft = BEREIT
- Im Kal Modus Fühlerblatt händisch in gewünschte Neutrallage bringen und KAL-Taste drücken --> LED quittiert grün für 1sec */dies ist die Stellung, in der die Canards neutral liegen sollen
- Drücken der NEUtral-Taste springt zum nächsten Schritt. Solange die nicht gedrückt wurde, kann das Drücken der KAL-Taste beliebig oft wiederholt werden, bis einem die Position gefällt
- Fühlerblatt an die obere erlaubte Grenze bringen, KAL-Taste drücken --> LED quittiert durch grünes doppelblinken für 1sec */dies ist die Stellung, in der die Canards die max Auslenkung nach oben haben sollen
- Drücken der NEUtral-Taste springt zum nächsten Schritt. Solange die nicht gedrückt wurde, kann das Drücken der KAL-Taste beliebig oft wiederholt werden, bis einem die Position gefällt
- Fühlerblatt an die untere erlaubte Grenze bringen, KAL-Taste drücken --> LED quittiert durch grünes dreifachblinken für 1sec */dies ist die Stellung, in der die Canards die max Auslenkung nach oben haben sollen
- Drücken der NEUtral-Taste springt zum nächsten Schritt. Solange die nicht gedrückt wurde, kann das Drücken der KAL-Taste beliebig oft wiederholt werden, bis einem die Position gefällt
- Nach Drücken der NEU-Taste blinkt die LED entweder langsam rot oder grün, diese Anzeige gehört schon zum nächsten Menüpunkt: Servoumpolung
Damit ist die Kalibrierung abgeschlossen und der KAL-Modus kann wieder mit 3sec Drücken beider Tasten verlassen werden.
Servoumpolung:
Im KAL-Modus bleiben, die LED blinkt langsam (1Hz) rot oder grün (default=grün=nicht invertiert)
- Drücken der KAL-Taste invertiert das Servosignal und die LED ändert sich von grün in rot langsam blinkend (rot=invertiert)
- Solange die NEU-Taste nicht gedrückt wurde, kann das Drücken der KAL-Taste beliebig oft wiederholt werden, bis einem die Servorichtung und/oder die Farbe des LED-Blinkens gefällt. Die Farbe signalisiert immer die aktuelle Einstellung
- NEU-Taste drücken, nächster Schritt: LED doppelblinkt langsam grün (default=grün=nicht invertiert) */das ist Servo 2, deswegen doppelblinken, es kann ja sein, daß einer je Canard ein Servo verwendet (so wie ich ), diese müßten dann gegensinnig laufen
- Drücken der KAL-Taste invertiert das Servosignal des 2ten Servoausgangs und die LED ändert sich von grün in rot langsam doppelblinkend (rot=invertiert)
- Solange die NEU-Taste nicht gedrückt wurde, kann das Drücken der KAL-Taste beliebig oft wiederholt werden, bis einem die Servorichtung und/oder die Farbe des LED-Doppelblinkens gefällt. Die Farbe signalisiert immer die aktuelle Einstellung.
Mit Drücken der NEU-Taste ist die Servoumpolung abgeschlossen und der KAL-Modus wird automatisch verlassen.
Die LED blinkt für 1sek abwechselnd schnell grün und rot zur Quittung.
Danach leuchtet die LED dauerhaft grün zur Meldung "Betriebsbereit"
Durch erneutes drücken beider Tasten für 3sec kann der KAL-Modus jederzeit wieder aktiviert werden
Die rote LED kan man nun noch für allerlei lustige Fehlercodes benutzen")
Man sollte noch einen "Advanced Mode" einbringen, mit dem sich die 1520µs ändern lassen, zB auf die tatsächliche Neutralpulslänge des Servos, oder um sonstwie einen Offset reinzubringen.
Im Prinzip alles poplige Schleifen... nur noch "Do while" davorschreiben und fertich is dat Programm
Für alle Modelle, die damit ausgerüstet werden, wird gelten, daß der Stallpunkt rausgeschoben wird und auf hecklastige Auslegungen besser reagiert werden kann. Und, es wird lässig aussehen, wenn die Canards bei einem langsamen hi-alpha Vorbeiflug der Strömung folgen und nicht dreist nach oben in den Himmel zeigen! Vllt konnte ich die Motivation ja ein wenig anfachen?
Grüßle,
o.d.
jepp, 1er und 1,5er Lager sind aufm Weg (1x3x1 & 1,5x4x2). Die 1,5er sind sogar in ZZ-Ausführungsteinix schrieb:es gibt mikrokugellageru.a. von grw, für wellen von z.b. 2mm.
2er hab ich noch da, sind aber m.E. schon zu groß.
Hab noch zahllose Bilder durchgeguckt und schätze 5x7 ist das höchste der Gefühle. Größer wäre zwar einfacher, sähe aber sch..ße aus. Eine Verschönerung sind die beiden Dinger ohnehin nicht...
Naja, so ganz unmotiviert scheinst Du ja doch nicht (erfreulicherweise!) zu sein, immerhin hats bereits zu nem Post gereichtAngenommen, ich könnte sowas bauen, würde mir die Motivation fehlen.
Ein reizvolles Projekt, aber, ab welcher Modellgröße merkt man denn eine Wirkung?
Ich würde es so bauen:
Eine Wirkung? Ab Modellgröße "flugfähig" würde ich mal sagen. Je größer, umso eher auch für unsere menschlische Wahrnehmung erfaßbar.
Der Knackpunkt liegt eher in der Machbarkeit in beliebig kleinem Maßstab. 1:16 oder meinetwegen :15 ist schon sportlich! Zugegeben
Ab 1:8...9 wird es fürs Auge deutlich wahrnehmbar, also die Mehrzahl aller Jetmodelle. In der Größe sind die baulichen Herausforderungen auch eher überschaubar.
Bei 1:15 oder 16 grenzt das an "Uhrmacherei"
So wie in Deiner Skizze habe ich mir das vorgestellt, nur jetzt noch sinngemäß um einen Eingang fürs Höhenrudersignal erweitert, zum Durchleiten des HR-Signals ohne Zuwirkung des Sensors (zum Beimischen für Flieger mit HR-wirksamen Canards).
Nochn Tasteneingang dazu zum Kalibrieren der Neutrallage, nur im KAL-Modus aktiv
Eine weitere Taste für ein konstantes Mittensignal zum Servo(s) (1520µs wenn gedrückt, ist immer aktiv. Dient zur mechanischen Neutralstellung der Canards zur Servomitte)
Ein oder zwei unterschiedlich farbige LEDs zur Mitteilung des Betriebszustandes
Merke: Im Kalibriermodus folgen die Servos den Sensoren erst, nachdem deren Neutrallage definiert wurde. BIS dahin sind die Servos auf 1520µs konstant.
Kalibrierung:
- Beide Tasten für 3 Sek gedrückt = Kalibriermodus --> LED blinkt schnell, gelb (rot+grün)
- Nochmal dasselbe verläßt den Kal Modus wieder ohne Änderung --> LED leuchtet grün dauerhaft = BEREIT
- Im Kal Modus Fühlerblatt händisch in gewünschte Neutrallage bringen und KAL-Taste drücken --> LED quittiert grün für 1sec */dies ist die Stellung, in der die Canards neutral liegen sollen
- Drücken der NEUtral-Taste springt zum nächsten Schritt. Solange die nicht gedrückt wurde, kann das Drücken der KAL-Taste beliebig oft wiederholt werden, bis einem die Position gefällt
- Fühlerblatt an die obere erlaubte Grenze bringen, KAL-Taste drücken --> LED quittiert durch grünes doppelblinken für 1sec */dies ist die Stellung, in der die Canards die max Auslenkung nach oben haben sollen
- Drücken der NEUtral-Taste springt zum nächsten Schritt. Solange die nicht gedrückt wurde, kann das Drücken der KAL-Taste beliebig oft wiederholt werden, bis einem die Position gefällt
- Fühlerblatt an die untere erlaubte Grenze bringen, KAL-Taste drücken --> LED quittiert durch grünes dreifachblinken für 1sec */dies ist die Stellung, in der die Canards die max Auslenkung nach oben haben sollen
- Drücken der NEUtral-Taste springt zum nächsten Schritt. Solange die nicht gedrückt wurde, kann das Drücken der KAL-Taste beliebig oft wiederholt werden, bis einem die Position gefällt
- Nach Drücken der NEU-Taste blinkt die LED entweder langsam rot oder grün, diese Anzeige gehört schon zum nächsten Menüpunkt: Servoumpolung
Damit ist die Kalibrierung abgeschlossen und der KAL-Modus kann wieder mit 3sec Drücken beider Tasten verlassen werden.
Servoumpolung:
Im KAL-Modus bleiben, die LED blinkt langsam (1Hz) rot oder grün (default=grün=nicht invertiert)
- Drücken der KAL-Taste invertiert das Servosignal und die LED ändert sich von grün in rot langsam blinkend (rot=invertiert)
- Solange die NEU-Taste nicht gedrückt wurde, kann das Drücken der KAL-Taste beliebig oft wiederholt werden, bis einem die Servorichtung und/oder die Farbe des LED-Blinkens gefällt. Die Farbe signalisiert immer die aktuelle Einstellung
- NEU-Taste drücken, nächster Schritt: LED doppelblinkt langsam grün (default=grün=nicht invertiert) */das ist Servo 2, deswegen doppelblinken, es kann ja sein, daß einer je Canard ein Servo verwendet (so wie ich
), diese müßten dann gegensinnig laufen- Drücken der KAL-Taste invertiert das Servosignal des 2ten Servoausgangs und die LED ändert sich von grün in rot langsam doppelblinkend (rot=invertiert)
- Solange die NEU-Taste nicht gedrückt wurde, kann das Drücken der KAL-Taste beliebig oft wiederholt werden, bis einem die Servorichtung und/oder die Farbe des LED-Doppelblinkens gefällt. Die Farbe signalisiert immer die aktuelle Einstellung.
Mit Drücken der NEU-Taste ist die Servoumpolung abgeschlossen und der KAL-Modus wird automatisch verlassen.
Die LED blinkt für 1sek abwechselnd schnell grün und rot zur Quittung.
Danach leuchtet die LED dauerhaft grün zur Meldung "Betriebsbereit"
Durch erneutes drücken beider Tasten für 3sec kann der KAL-Modus jederzeit wieder aktiviert werden
Die rote LED kan man nun noch für allerlei lustige Fehlercodes benutzen
Man sollte noch einen "Advanced Mode" einbringen, mit dem sich die 1520µs ändern lassen, zB auf die tatsächliche Neutralpulslänge des Servos, oder um sonstwie einen Offset reinzubringen.
Im Prinzip alles poplige Schleifen... nur noch "Do while" davorschreiben und fertich is dat Programm
Für alle Modelle, die damit ausgerüstet werden, wird gelten, daß der Stallpunkt rausgeschoben wird und auf hecklastige Auslegungen besser reagiert werden kann. Und, es wird lässig aussehen, wenn die Canards bei einem langsamen hi-alpha Vorbeiflug der Strömung folgen und nicht dreist nach oben in den Himmel zeigen! Vllt konnte ich die Motivation ja ein wenig anfachen?
Grüßle,
o.d.
Superkleber
User
Shit hot!
Meier111
User
Mir ist das zu viel....
Nochn Tasteneingang dazu zum Kalibrieren der Neutrallage, nur im KAL-Modus aktiv
Eine weitere Taste für ein konstantes Mittensignal zum Servo(s) (1520µs wenn gedrückt, ist immer aktiv. Dient zur mechanischen Neutralstellung der Canards zur Servomitte)
Ein oder zwei unterschiedlich farbige LEDs zur Mitteilung des Betriebszustandes...
Diverse BLDC-Regler sind z.B. furchtbar, so ohne Programmierkarte.
Ungefähr 2175 Einstellmöglichkeiten, alle per Steuerknüppel anwählbar.
Besser: einen FTDI-Chip (USB-COM Adapter) auf die Leiterplatte pappen. Oder, von mir aus, ein externes USB-Dongle.
Damit kann man bequem vom PC oder ähnlichem das Setup ändern.
Eine LED würde ich trotzdem spenden. Als Status-LED. Blinkt langsam, wenn alles OK.


Okke Dillen
User
Nabendsn,
hmm, aber über die bekloppte Knüppelprogrammiererei von BL-Reglern beschwerst Du Dich, wobei ich zustimme. Ist Schrott. Schrott, weil der Programmierer zu faul war, nen vernünftiges UI dazuzuproggen. Dabei wärs so einfach...
Und als Alternative bietest Du ein USB-Interface und ggfs ne GUI aufm Schlepptop? Das ist jetzt nicht Dein Ernst?! Du willst jedesmal nen Schlepptop mit aufn Flugplatz zerren, um ne kleine Änderung zB an der Neutrallage vorzunehmen? Nee oder?? Dann doch lieber Knöppsche drügge, Sensorblatt in neuer Position halten, Knöbbsche drügge, feddisch! Ist doch ideal?!
USB kann man ja gerne machen - zusätzlich! Wenn ich es richtig sehe, kann der Ardu während des normalen Programmablaufs auch über die Sellerie kommunizieren, quasi gleichzeitig (natürlich sequentiell, aber geschickt verschachtelt, geht das schon, wenn ichs richtig sehe, ist jetzt nicht meine Kernkompetenz...). Über das Breakout Board ist ja dann ruckzuck eine USB-Verbindung zum Rechner hergestellt.
Hab mich gestern und heute abend mal mit dem Atmega328 näher befaßt, und komme zur Einsicht, daß das alles doch nicht soooo schwierig ist. Erste Subroutines funktionieren bereits - äähm: lassen sich compilieren! Heißt ja noch nicht, daß es funzt wies soll, aber der Anfang ist gemacht. Ich sitz halt mitm "Ardu-Lexikon" aufm Schoß da und übersetze Stück für Stück Prosa in Ardu, sieht alles ziemlich ähnlich aus wie C. Bei mancher Syntax knirschts halt erstmal, aber nach und nach kommt man rein... das Eichhörnchen ernährt sich halt mal wieder mühsam, hab ja Übung als Eichhörnchen
Die Idee mit dem ECU-Terminal hat auch was, besser und leichter transportabel als ein PC. Frage ist, ob der Klartext-Dialog aufm Display im Terminal programmiert ist oder in der ECU, vermute im Terminal. Theoretisch wärs aber auch in der ECU bzw in meinem Fall dann im Arduino.
Eine etwas bittere Pille ist die ADC-Auflösung von nur 10bit. Immerhin, durch den Uref-IN kann man das ewcht genau auf die Amplitude des Sensors zurechtstricken, sodaß man fast die gesamten 1024 Werte auf den Signalbereich verteilt bekommt. 12bit wären mir lieber gewesen. Naja, dann eben erst mal in der 1024er Variante, wie beim guten alten PCM1024
Zur Abwechslung gibts mal wieder ein paar Bilder. Die Lager sind heute angekommen, die sind voll süüüüß!!!! Guckt ma:

1mm und 1,5mm Wellendurchmesser machen einen Riesenunterschied! Uff!!
Bin jetzt doch einigermaßen optimistisch, das es mechanisch in der Größe machbar ist
Die Seitenruder bekamen ihre Servoabdeckungen und mit der Verkabelung wurde ich mir auch endlich einig... tja und so sind von den 10m Servolitze gerade mal noch 1,8m übrig...

Klar, da sind einige Überlängen mit drin, die später wieder gekürzt werden, aber trotzdem:

Kabelkanal einbringen...

nen ausgedienten Pfeilschaft zu Dübeln ummünzen...

Dübel eingelocht und verklebt.... härtete über Nacht...

Endmontage der Servoabdeckungen...

Servodeckels druff...

außen geklebt - innen geschraubt!
Knapp unter 50g son Ruder. Farbe runter, Glas drauf, Farbe drauf, dann dürften sich ca 55g einstellen - MIT Servo natürlich! Geht doch!
So long...to be continüüd...
Guts Nächtle
Meier111 schrieb:Mir ist das zu viel.
hmm, aber über die bekloppte Knüppelprogrammiererei von BL-Reglern beschwerst Du Dich, wobei ich zustimme. Ist Schrott. Schrott, weil der Programmierer zu faul war, nen vernünftiges UI dazuzuproggen. Dabei wärs so einfach...
Und als Alternative bietest Du ein USB-Interface und ggfs ne GUI aufm Schlepptop? Das ist jetzt nicht Dein Ernst?! Du willst jedesmal nen Schlepptop mit aufn Flugplatz zerren, um ne kleine Änderung zB an der Neutrallage vorzunehmen? Nee oder?? Dann doch lieber Knöppsche drügge, Sensorblatt in neuer Position halten, Knöbbsche drügge, feddisch! Ist doch ideal?!
USB kann man ja gerne machen - zusätzlich! Wenn ich es richtig sehe, kann der Ardu während des normalen Programmablaufs auch über die Sellerie kommunizieren, quasi gleichzeitig (natürlich sequentiell, aber geschickt verschachtelt, geht das schon, wenn ichs richtig sehe, ist jetzt nicht meine Kernkompetenz...). Über das Breakout Board ist ja dann ruckzuck eine USB-Verbindung zum Rechner hergestellt.
Hab mich gestern und heute abend mal mit dem Atmega328 näher befaßt, und komme zur Einsicht, daß das alles doch nicht soooo schwierig ist. Erste Subroutines funktionieren bereits - äähm: lassen sich compilieren! Heißt ja noch nicht, daß es funzt wies soll, aber der Anfang ist gemacht. Ich sitz halt mitm "Ardu-Lexikon" aufm Schoß da und übersetze Stück für Stück Prosa in Ardu, sieht alles ziemlich ähnlich aus wie C. Bei mancher Syntax knirschts halt erstmal, aber nach und nach kommt man rein... das Eichhörnchen ernährt sich halt mal wieder mühsam, hab ja Übung als Eichhörnchen
Die Idee mit dem ECU-Terminal hat auch was, besser und leichter transportabel als ein PC. Frage ist, ob der Klartext-Dialog aufm Display im Terminal programmiert ist oder in der ECU, vermute im Terminal. Theoretisch wärs aber auch in der ECU bzw in meinem Fall dann im Arduino.
Eine etwas bittere Pille ist die ADC-Auflösung von nur 10bit. Immerhin, durch den Uref-IN kann man das ewcht genau auf die Amplitude des Sensors zurechtstricken, sodaß man fast die gesamten 1024 Werte auf den Signalbereich verteilt bekommt. 12bit wären mir lieber gewesen. Naja, dann eben erst mal in der 1024er Variante, wie beim guten alten PCM1024
Zur Abwechslung gibts mal wieder ein paar Bilder. Die Lager sind heute angekommen, die sind voll süüüüß!!!!
Guckt ma:1mm und 1,5mm Wellendurchmesser machen einen Riesenunterschied! Uff!!
Bin jetzt doch einigermaßen optimistisch, das es mechanisch in der Größe machbar ist
Die Seitenruder bekamen ihre Servoabdeckungen und mit der Verkabelung wurde ich mir auch endlich einig... tja und so sind von den 10m Servolitze gerade mal noch 1,8m übrig...
Klar, da sind einige Überlängen mit drin, die später wieder gekürzt werden, aber trotzdem:
Kabelkanal einbringen...
nen ausgedienten Pfeilschaft zu Dübeln ummünzen...
Dübel eingelocht und verklebt.... härtete über Nacht...
Endmontage der Servoabdeckungen...
Servodeckels druff...
außen geklebt - innen geschraubt!
Knapp unter 50g son Ruder. Farbe runter, Glas drauf, Farbe drauf, dann dürften sich ca 55g einstellen - MIT Servo natürlich! Geht doch!
So long...to be continüüd...
Guts Nächtle
Meier111
User
Kein Notebook. Wenn, dann mit Smartphone über Blauzahn....
Und als Alternative bietest Du ein USB-Interface und ggfs ne GUI aufm Schlepptop? Das ist jetzt nicht Dein Ernst?! Du willst jedesmal nen Schlepptop mit aufn Flugplatz zerren, um ne kleine Änderung zB an der Neutrallage vorzunehmen? Nee oder?? Dann doch lieber Knöppsche drügge, Sensorblatt in neuer Position halten, Knöbbsche drügge, feddisch! Ist doch ideal?!
...
Du machst hier so eine Megashow (ist nett gemeint!) in Styro, und gibst Dich mit bisschen Knöppsche drügge zufrieden?
Wie wärs mit so einem Programmierdongle?

Okke Dillen
User
Meier, jetzt haste mich aber gschwind beeindruckt! Ok, ich erkenne zwar die "Zensurbalken" und daß es wahrscheinlich nicht ein fix und fertiger AoA-Controler ist, aber durchaus als solcher (um)programmierbar wäre. Mit dem Konzept könnte ich mich tatsächlich anfreunden, obwohl ich jetzt nicht der Fan von Peripherie bin ...erstrecht nicht von Blauzahn, weil das auch auf 2,4 rumparasitiert (oder ist das nur bei WLan so?) und ich eher bestrebt bin, diesen Frequenzbereich ausschließlich den RC-Anlagen der Kollegen am Platz zu überlassen und nicht mit anderem Kram zuzumüllen. ja, ich weiß, theoretisch sollte das nix ausmachen, sogar praktisch hat es schon problemlos funktioniert, sogar mit ner WLan-Strecke noch dabei, aber ich vermeide eben gern unnötige Eventualitäten, die Bandbreite steigt durch weitere Beleger ja nicht und trau schau wem
Trotzdem, als Add-on wäre der Blauzahn aber schon cool. Mit ner App ne nette GUI dazu gebastelt und ab dafür. Müßte halt abschaltbar sein, daß er im Flug nicht den HF-Squelch vom RC-Empfänger "zu-trompetet". Sieht nach Eigenbau aus. Ich weiß ja nicht...wie siehtn das aus, wenn man... die HW würde ich neu designen, zugeschnittener und... ok-ok, PN, wird sonstn bißchen zu arg OT
Ok, ich erkenne zwar die "Zensurbalken" und daß es wahrscheinlich nicht ein fix und fertiger AoA-Controler ist, aber durchaus als solcher (um)programmierbar wäre. Mit dem Konzept könnte ich mich tatsächlich anfreunden, obwohl ich jetzt nicht der Fan von Peripherie bin ...erstrecht nicht von Blauzahn, weil das auch auf 2,4 rumparasitiert (oder ist das nur bei WLan so?) und ich eher bestrebt bin, diesen Frequenzbereich ausschließlich den RC-Anlagen der Kollegen am Platz zu überlassen und nicht mit anderem Kram zuzumüllen. ja, ich weiß, theoretisch sollte das nix ausmachen, sogar praktisch hat es schon problemlos funktioniert, sogar mit ner WLan-Strecke noch dabei, aber ich vermeide eben gern unnötige Eventualitäten, die Bandbreite steigt durch weitere Beleger ja nicht und trau schau wem Trotzdem, als Add-on wäre der Blauzahn aber schon cool. Mit ner App ne nette GUI dazu gebastelt und ab dafür. Müßte halt abschaltbar sein, daß er im Flug nicht den HF-Squelch vom RC-Empfänger "zu-trompetet". Sieht nach Eigenbau aus. Ich weiß ja nicht...wie siehtn das aus, wenn man... die HW würde ich neu designen, zugeschnittener und... ok-ok, PN, wird sonstn bißchen zu arg OT
Okke Dillen
User
Nabend zusammen!
Na während im Hintergrund die Sache mit dem AoA-Sensor reift, hab ich mal noch ein bissi an Bildern was nachzuholen!

Stecker für die hinteren Servos verharzt

Halter für Servo-Anschlußleiste aus Balsa-Kevlar-Sandwitch

Servo-Anschlußleiste mit Halter eingeklebt

Servo-Anschlußleiste beschriftet - das hilft!

Zugangsklappe im Rumpfboden

Zugangsklappe mit Befestigungsecken

SV-HR Servoaussparungen

Kabelsalat

Kabelsalat gebändigt

Canardservos und Halter für Flachmontage

Canardservohalter rechts ausgerichtet und eingeklebt

beide Canardservohalter drin

Das Stellwerk
Guts Nächtle,
o.d.
***Edith's (peinlicher?) Nachtrag: ach übrigens, hat irgendeiner von Euch auf irgendeiner Aufnahme der echten 34 irgendwo eine ausgefahrene Rückenbremsklappe wie bei der 27 gesehen???
Mir fiel kürzlich auf: ich NICHT!!!
Ohne Sch..ß jetzt... und nu?? das wär ja ... ähm ................. ne tolle Wartungsklappe!!!
Oder hat vielleicht doch jemand ne Aufnahme gesehen, wo die ausgefahren ist? ...vielleicht?? Auch die Rückenbeblechung läßt nicht wirklich auf so eine Klappe schließen, eigentlich eher gar nicht...
Na während im Hintergrund die Sache mit dem AoA-Sensor reift, hab ich mal noch ein bissi an Bildern was nachzuholen!
Stecker für die hinteren Servos verharzt
Halter für Servo-Anschlußleiste aus Balsa-Kevlar-Sandwitch
Servo-Anschlußleiste mit Halter eingeklebt
Servo-Anschlußleiste beschriftet - das hilft!
Zugangsklappe im Rumpfboden
Zugangsklappe mit Befestigungsecken
SV-HR Servoaussparungen
Kabelsalat
Kabelsalat gebändigt
Canardservos und Halter für Flachmontage
Canardservohalter rechts ausgerichtet und eingeklebt
beide Canardservohalter drin
Das Stellwerk
Guts Nächtle,
o.d.
***Edith's (peinlicher?) Nachtrag: ach übrigens, hat irgendeiner von Euch auf irgendeiner Aufnahme der echten 34 irgendwo eine ausgefahrene Rückenbremsklappe wie bei der 27 gesehen???
Mir fiel kürzlich auf: ich NICHT!!!
Ohne Sch..ß jetzt... und nu?? das wär ja ... ähm ................. ne tolle Wartungsklappe!!!
Oder hat vielleicht doch jemand ne Aufnahme gesehen, wo die ausgefahren ist? ...vielleicht?? Auch die Rückenbeblechung läßt nicht wirklich auf so eine Klappe schließen, eigentlich eher gar nicht...
Zuletzt bearbeitet:
Hammerfall
User
So ist es, die Speedbrake ist dem Modernisierungsprogramm zum Opfer gefallen.
Gebremst wird seitdem mit gegenseitigen Ausschlag der Seitenruder.
Und auf dem Boden mit zwei schicken Bremsschirmen.
Gebremst wird seitdem mit gegenseitigen Ausschlag der Seitenruder.
Und auf dem Boden mit zwei schicken Bremsschirmen.
Hammerfall
User
P.s. Im Rumpfrücken wäre auch gar kein Platz, da ist nämlich das Scheisshaus (excuse my French) untergebracht
GePo
User
Zusatzbildchen...
Zusatzbildchen...
Hallo O.D.,
super toller Bericht!! Verfolge ich gespannt weiter
Vielleicht kennst die Bilder hier ja schon, ansonsten sind´s möglicherweise noch hilfreich:
http://thebrigade.thechive.com/2013/03/05/go-bombing-side-by-side-in-the-sukhoi-su-34-51-hq-photos/
Gruß,
Georg
Zusatzbildchen...
Hallo O.D.,
super toller Bericht!! Verfolge ich gespannt weiter
Vielleicht kennst die Bilder hier ja schon, ansonsten sind´s möglicherweise noch hilfreich:
http://thebrigade.thechive.com/2013/03/05/go-bombing-side-by-side-in-the-sukhoi-su-34-51-hq-photos/
Gruß,
Georg
turbifrank
User
Sehr schön …...Bild 11,26 und 48 fügen sich nahtlos in die Bildreihe ein
Gruß
Gruß
oberleutnant
User
Jets von Suchoi und Mikojan/Gurewitsch haben halt den besten Sex-Appeal,...bei den russischen Frauen verständlich ....
- echt scharf
- echt scharf
das "produktdesign" der su27-aufwärts und mig29 gefällt mir auch wirklich ausnehmend gut, da hinken die amis deutlich hinterher, bei der su34 stört mich aber dieses frontale entenschnabeldesign gewaltig von meinem ästhetischen empfinden her .
.
trotzdem, so wie jörg das macht, tolle sache!!!!
, bei der su34 stört mich aber dieses frontale entenschnabeldesign gewaltig von meinem ästhetischen empfinden her.trotzdem, so wie jörg das macht, tolle sache!!!!
Okke Dillen
User
Nabend zusammen
In dem Zusammenhang auch vielen Dank an Georg und die Bilder!! Da ist das schönste Klo-Bild dabei, das ich je gesehen habe und offensichtlich hat man da nochmal "getunt" und nachgelegt in Sachen Komfort. Ist schon ein ganz schöner "Luxus-Bomber" die 34! In dieser Flugzeugklasse wohl einzigartig
etc...
Ich weiß jetzt auch wieder, wie ich mir den Film mit der Klappe inn Kopp gesetzt hab. Kurz vor Beginn habe ich unzählige SU-27 Bilder gewälzt und zahllose Details beglotzt und dabei eben auch die Klappe - wie gesagt, hier steht ja noch ne 27 in der Pipe...
So, leider muß ich übers Wochenende den "Partykellermodus" aktivieren... ans Werk!
Baupause
tja, sieht wohl nach Pech für mich aus... die 34 hat diese Klappe offenbar nicht. Glück hingegen für eine Wartungsklappe zur Kontrolle des Füllstandes beim Betanken (der Platy faßt ja 2L bei nur1L Betankungsmenge, da muß man schon aufpassen) dat Klapp is allso schon volll korrekt - puh! Schwein gehabtguck mal im wikipedia zum su-30 artikel, da wurde beschrieben, daß su das mit der airbrake aufm rücken bei einer modifikation eingestellt hat. wurde dann evtl. bei der 34er so weitergeführt???
hehe, wenn ich dort nicht die Turbinen-Peripherie unterbringen wollte und die gesamte RC-Elektronik, würde ich glatt eine Toilette aus Styro nachmodellieren und einbauen, ich war schon haarscharf davorHammerfall: P.s. Im Rumpfrücken wäre auch gar kein Platz, da ist nämlich das Scheisshaus (excuse my French) untergebracht
In dem Zusammenhang auch vielen Dank an Georg und die Bilder!! Da ist das schönste Klo-Bild dabei, das ich je gesehen habe
und offensichtlich hat man da nochmal "getunt" und nachgelegt in Sachen Komfort. Ist schon ein ganz schöner "Luxus-Bomber" die 34! In dieser Flugzeugklasse wohl einzigartig nahtloser gehts nicht!turbifrank: Sehr schön …...Bild 11,26 und 48 fügen sich nahtlos in die Bildreihe ein
ja... da könnte es Zusammenhänge gebenoberleutnant: Jets von Suchoi und Mikojan/Gurewitsch haben halt den besten Sex-Appeal,...bei den russischen Frauen verständlich ....
- echt scharf
und genau DIE ist es, die mich eben noch mehr begeistert, als die schnittige Jetform allein schon. Es gibt auch weitere Flieger, die aufgrund dieses Merkmals, abgeplattete Schnute, bereits einen Optikbunus bei mir genießen. Die SR71 gehört dazu, die F5, der Baiojetsteinix: ...bei der su34 stört mich aber dieses frontale entenschnabeldesign gewaltig von meinem ästhetischen empfinden her. trotzdem, so wie jörg das macht, tolle sache!!!!
etc... Ich weiß jetzt auch wieder, wie ich mir den Film mit der Klappe inn Kopp gesetzt hab. Kurz vor Beginn habe ich unzählige SU-27 Bilder gewälzt und zahllose Details beglotzt und dabei eben auch die Klappe - wie gesagt, hier steht ja noch ne 27 in der Pipe...
So, leider muß ich übers Wochenende den "Partykellermodus" aktivieren... ans Werk!
Baupause